




多功能上肢康复机器人项目推介
项目(成果)名称:多功能上肢康复机器人项目
所属产业类别:先进制造产业类、康复医疗产业类
项目(成果)介绍:
现在,国内康复机器人大多模式相对单一,主要外骨骼机器人为主,且都处于起步阶段。在现有康复机器人当中存在:使用灵活性差、主动运动控制效果差,以及空间功能训练缺乏、坐卧训练难以统一及过程舒适度不足等问题,难以满足病人和医师对康复机器人的要求。
王钰教授创新性的提出两种新型的上肢康复机器人结构,分别为多功能上肢关节肌肉康复机器人和悬臂式上肢神经康复机器人。多功能上肢关节肌肉康复机器人采用三自由度结构,拥有最大的外展、外旋和前屈运动空间,采用肩关节自对齐系统,动态响应人体肩关节在运动时的位置变化。采用了模块化设计,展臂部分可以进行外骨骼模组和简单臂模组的切换,即可进行上肢外骨骼机器人与上肢肌肉关节机器人的切换,分别进行神经康复训练和肌肉关节康复。 多功能上肢关节肌肉康复机器人拥有“等速运动模式,等张力模式,被动运动模式”等康复运动模式,主要针对上肢肌肉关节损伤的上肢病患,以及处于二级康复后期和三级康复时期的脑卒中后遗症患者,可以进行人体肌力测试,对肌肉关节康复有显著的效果。

悬臂式上肢康复机器人通过“主动运动、被动运动和助力运动相结合”的新型上肢康复模式,区别于传统的上肢康复机器人,创新性的采用悬臂式结构,以末端运动为主,可移动式底座,可以适应不同环境下的康复需求;适应患者人群广泛,主要针对一级康复时期及二级康复初期失去自主运动能力的脑卒中后遗症患者,解决了传统康复机器人无法解决的处于卧床期的康复患者的康复难题,对脑部运动神经控制区的重建、防止肌肉萎缩有着显著的效果。

技术创新点:
多功能上肢肌肉关节康复康复机器人与市面上的肌肉关节康复机器人多为单关节自由度系统不同的是,采用两自由度进行空间运动,采用肩轴自对齐系统,适应人体肩关节变化:
1. 模块化设计,展臂部分可以进行外骨骼模组和简单臂模组的切换,即可进行上肢外骨骼机器人与上肢肌肉关节机器人的切换,分别进行神经康复训练和肌肉关节康复。
2. 用二自由度结构,拥有最大的外展、外旋和前屈运动空间。
3. 采用肩关节自对齐系统,动态响应人体肩关节在运动时的位置变化。
4. 拥有“等速运动模式,等张力模式,被动运动模式”等康复运动模式。



悬臂式上肢神经康复机器人以末端运动为主,运动范围增大,安全性高,弥补了针对卧床期病人康复治疗的空白。
1、与传统外骨骼式机器人不同,以末端运动为主,运动范围大,安全性高,可对一级康复时期的病人进行被动康复训练
2、拥有主动轨迹跟踪训练模式,可进行沿任意轨迹的主动康复训练。
3、人机交互性强,可动态捕捉病人的运动轨迹,分析运动状况。
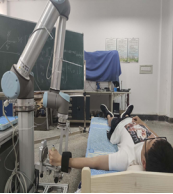
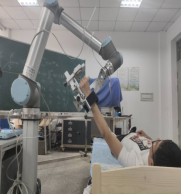



悬臂式上肢康复机器人康复示意图
市场前景分析:
目前,我国脑卒中偏瘫等患者有7000多万,且每年新增2百万偏瘫或脑卒中患者。传统的康复手段是靠医师拿着病患的胳膊进行肢体按摩,活动关节。劳动强度大,无法维持长时间有效的康复效果。所以上肢康复机器人辅助医师对患者进行康复治疗必然成为一种趋势。 2011年卫生部关于《综合医院康复医团队建设与管理指南》明确要求所有二级以上综合医院必须建设康复医学科,引进康复医疗设备。现在,国内康复机器人大多模式相对单一,且都处于起步阶段。然而,在现有康复机器人当中存在:使用灵活性差、主动运动控制效果差,以及空间功能训练缺乏、坐卧训练难以统一及过程舒适度不足等问题,难以满足病人和医师对康复机器人的要求。因此,在医院、康复中心及养老基地迫切需要一种新型的上肢康复机器人,使上肢运动恢复、锻炼、运动功能检测等问题得以解决,最终解决不同康复程度人群需求,达到安全康复,智能康复,趣味康复的效果。
科研团队介绍:
太阳成集团tyc234cc上肢康复研究实验室与太阳成集团tyc234cc附属医院康复医学科紧密合作。研究团队由太阳成集团tyc234cc高水平的学术研究梯度和专业的设计人员组成,主要研究人员11,其中教授2名,副教授2名,硕士学位研究人员7名。先后承担多项国家级、省市级课题和企业横向课题。
项目负责人信息:

王钰,男,1963年出生,太阳成集团tyc33455cc副教授,硕士研究生导师。主要研究方向为康复机器人与打磨机器人。
王钰主持开发工业机器人打磨系统已在许多企业推广使用,其中包括:青岛铸造机械集团等知名企业。
联系方式:
手机号码:13678886873
邮 箱:ywang@qdu.edu.cn